The gripping industry is undergoing radical changes. In the past, gripping processes were primarily geared toward boosting productivity and process reliability.

With the advent of smart factories, flexibility is becoming an increasingly important factor. According to Schunk, tomorrow’s grippers will enable flexible operations and even autonomous handling scenarios.
Until recently, industrial gripping has been relatively rigid; the geometry of the parts must be known, as well as the exact pick and place position. A reliable handling process can be provided by predefining traverse paths and specifying target point co-ordinates based on repeatable parts-feeding operations. With the rise of digitalisation, the trend is now moving towards highly automated, fully networked and autonomous manufacturing systems.
Against this backdrop, artificial intelligence (AI) is becoming increasingly important. The first cognitive intelligence applications for grippers in combination with cameras are already possible. This allows for intuitive training by the operator and autonomous handling of gripping tasks by the robot. For these applications, Schunk purposely designs practical, industry-oriented handling processes by limiting the number of component variations. This strategy streamlines the classification and training process.
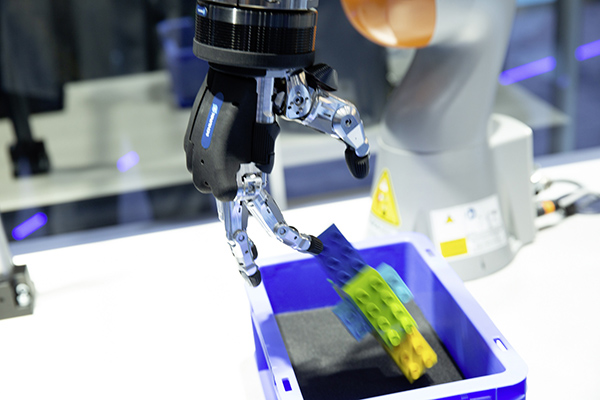
In an initial use case that makes use of machine learning approaches for workpiece and gripping process classification, interlocking building blocks are randomly combined and presented to a lightweight robot in a random arrangement on a work surface. The robot’s task is to pick up and transport the blocks. By interacting with 2D or 3D cameras, the self-learning system rapidly increases gripping reliability after only a few learning cycles. With each grip, the gripper learns how to successfully pick up and transport the component.
For further information www.schunk.com